
手动拖拽机器人,记录运动轨迹,辅助编程, 降低难度加快进度

图形拖拉式编程方式,快速入门

机器人与外界环境可靠的物理接触

机器人可以精准的识别TCP位置和重量,快速布局

防止伤害人员或损坏设备,实现更安全和谐的作业环境

机器人和外轴的插补运动,提高效率

机械臂

控制箱
示教器
手动拖拽机器人运动或操控触摸屏上的箭头控制机器人运动,记录途径的点位或轨迹,从而辅助编程,降低编程难度,加快任务进度。
图形化编程和脚本编程两种途径可供选择,满足不同人员的编程需求。
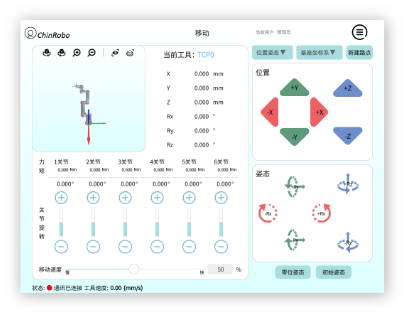
示教界面

图形化编程

脚本编程

示教器实际使用的过程与操作讲解



溱者智能科技




